Loading... # **运行demo.py** ## **第一步:** ### **拉取pysot源代码** ```python git clone https://github.com/STVIR/pysot ``` ## **第二步:** ### **设置环境** **打开 Anaconda Powershell Prompt,输入下面的命令,创建一个名为 “pysot” 的环境,指定使用 python 3.7 版本,然后切换到我们建立的这个新环境中** ```python conda create --name pysot python=3.7 conda activate pysot ``` ### **安装一些需要用到的库** ```python conda install numpy conda install pytorch=0.4.1 torchvision cuda90 -c pytorch pip install opencv-python pip install pyyaml yacs tqdm colorama matplotlib cython tensorboardX ``` ## **第三步:** ### **下载模型** **我们可以在 **[https://github.com/STVIR/pysot/blob/master/MODEL_ZOO.md](https://github.com/STVIR/pysot/blob/master/MODEL_ZOO.md)** 下载商汤提供的训练好的模型。他们提供了百度云下载。** **下载完成后,文件夹为 PySOT,里面包含了训练好的模型,需要将其放置到我们下载的 pysot-master\experiments 文件夹中。注意:仅放置各个子文件夹的model.pth文件,切勿将百度云下载的PySOT各子文件夹中的 config.yaml 复制到 experiments中进行替换** ## **第四步:** **把pysot,导入pycharm,配置pysot的环境,添加配置参数** ### **导入:** **直接拖入pycharm即可** ### **配置环境:** **添加conda环境,使用刚才我们第二步设置好的环境,找到环境的解释器,找到conda的执行文件,点击确认即可!** 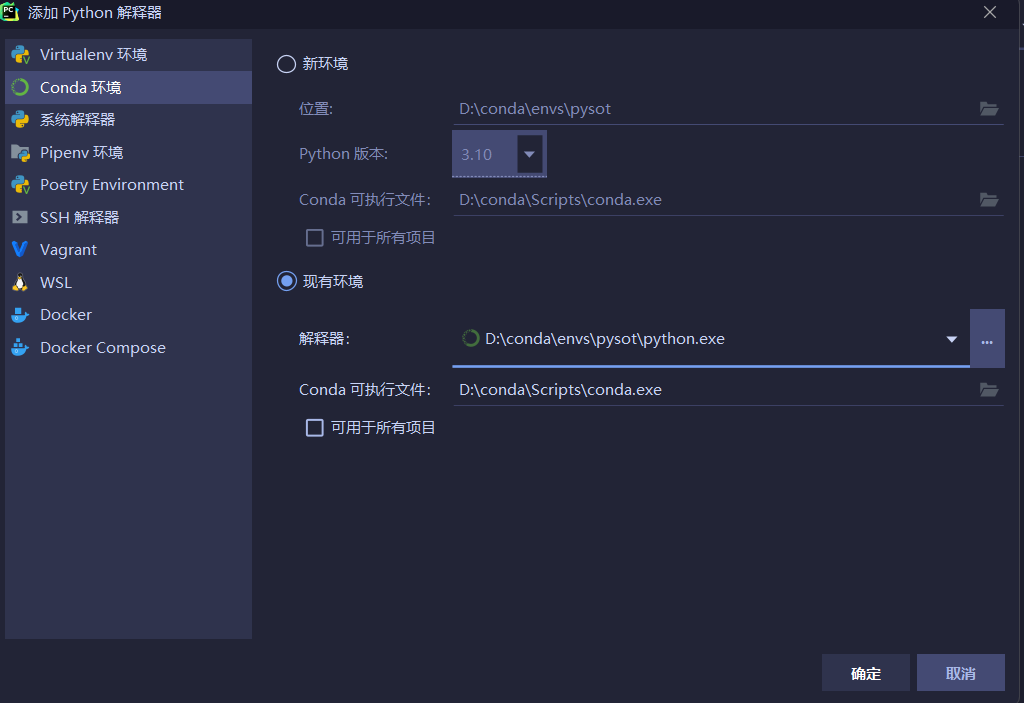 ### **添加配置参数:** **pycharm主界面 -》 最上面导航栏 -》运行 -》编辑配置 -》选择demo,然后我们开始配置形参参数** #### **在参数中,添加代码:** 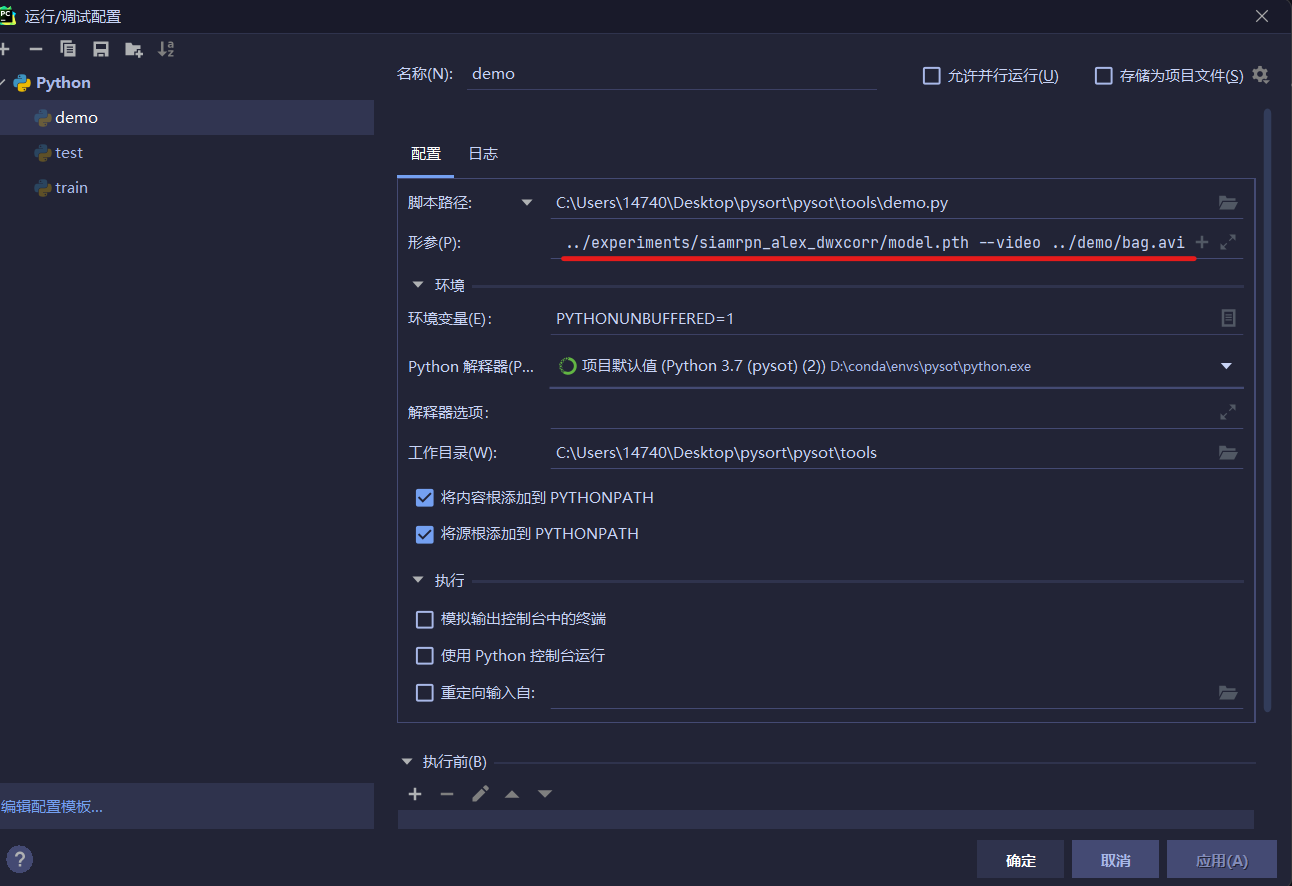 #### **添加如下参数(无摄像头):** ```python --config ../experiments/siamrpn_alex_dwxcorr/config.yaml --snapshot ../experiments/siamrpn_alex_dwxcorr/model.pth --video ../demo/bag.avi ``` #### **添加如下参数(有摄像头):** ```python --config ../experiments/siamrpn_alex_dwxcorr/config.yaml --snapshot ../experiments/siamrpn_alex_dwxcorr/model.pth ``` ## **第五步:** ### **运行demo.py文件:** 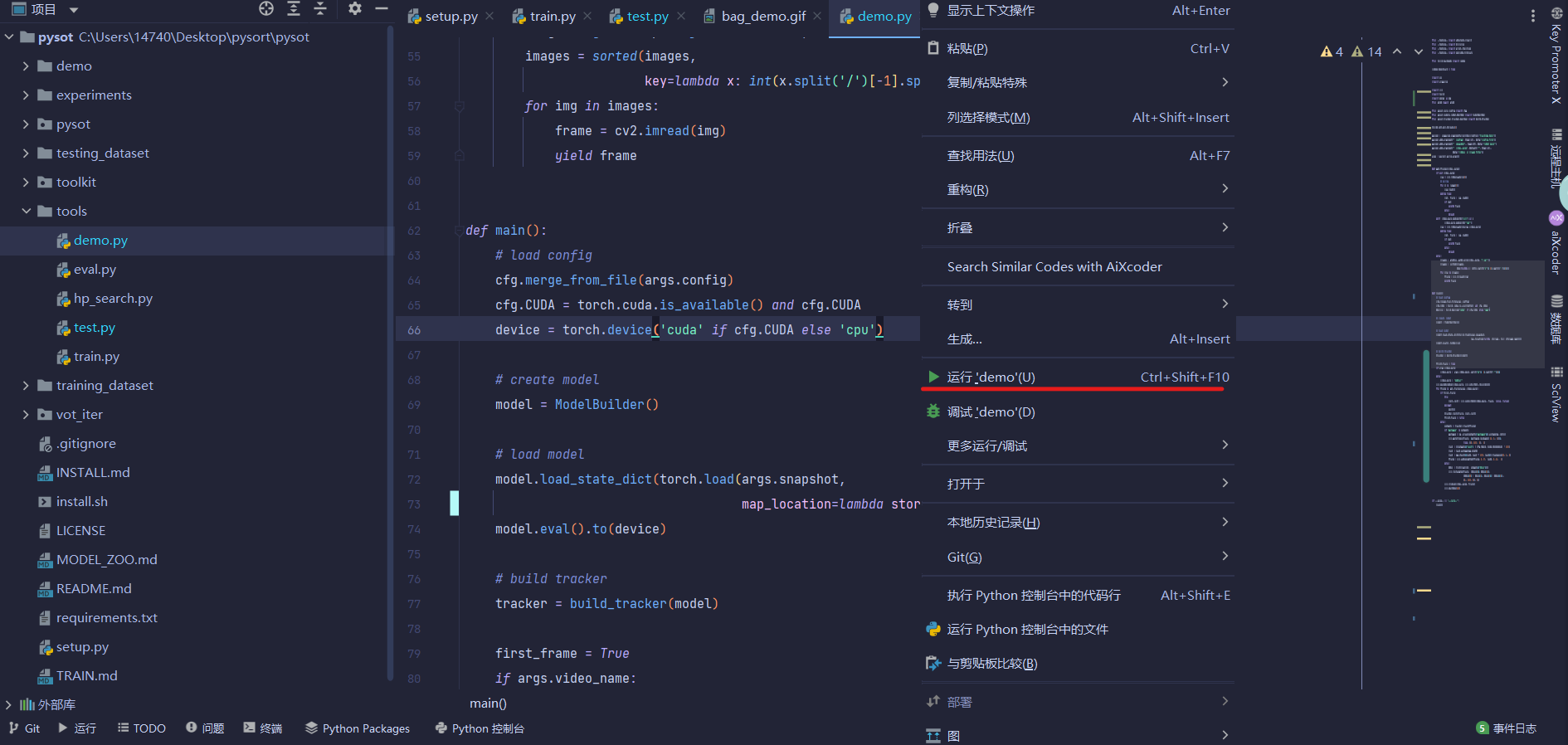 ### **如果报错** **可添加如下代码到dome.py的文件开始位置** ```python from torch.backends import cudnn cudnn.benchmark = True ``` ### **没有任何问题后** **当我们点击运行,后出现一个小框,我们画一个范围,然后按******空格******or******回车******即可** 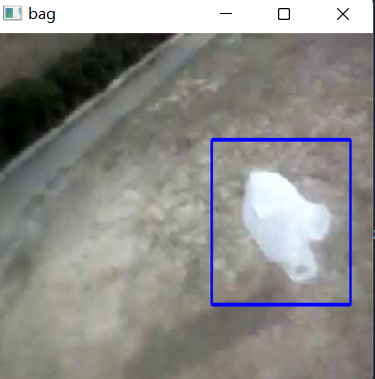 # **运行test.py** ## **第一步:** ### **数据准备:** **将CVRP13.json,OTB100.json,OTB50.json放在OTB100数据集目录中(您需要将Jogging复制到Jogging-1和Jogging-2,并将Skating2复制到Skating2-1和Skating2-2或使用软链接)** #### **OTB100数据集地址:** [https://pan.baidu.com/share/init?surl=mGrfVPXs7yz16vCBRwDurA](https://pan.baidu.com/share/init?surl=mGrfVPXs7yz16vCBRwDurA) 密码:faqb #### **json地址:** [https://pan.baidu.com/s/1js0Qhykqqur7_lNRtle1tA#list/path=%2F](https://pan.baidu.com/s/1js0Qhykqqur7_lNRtle1tA#list/path=%2F) ## **第二步:** **运行setup.py,生成build文件夹** ### **如果报错:** **pycharm环境下编辑setup.py配置**  #### **在参数中,添加代码:** ```python build_ext --inplace ``` ## **第三步:** ### **配置text.py**  #### **在参数中,添加代码:** ```python --snapshot ../experiments/siamrpn_alex_dwxcorr/model.pth --dataset OTB100 --config ../experiments/siamrpn_alex_dwxcorr/config.yaml ``` ## **第四步:** **开始运行test.py文件** ### **如出现报错** **再test.py文件首部添加如下代码:** ```python torch.backends.cudnn.benchmark = True ``` ### **如需更改训练集:** **可以在Run–>Edit configurations,参数上修改OTB100为VOT2016、VOT2018或其他,运行程序test.py。** **会将测试结果保存在./tools/results下面,后面的评估需要测试结果。** ### **训练ing:** 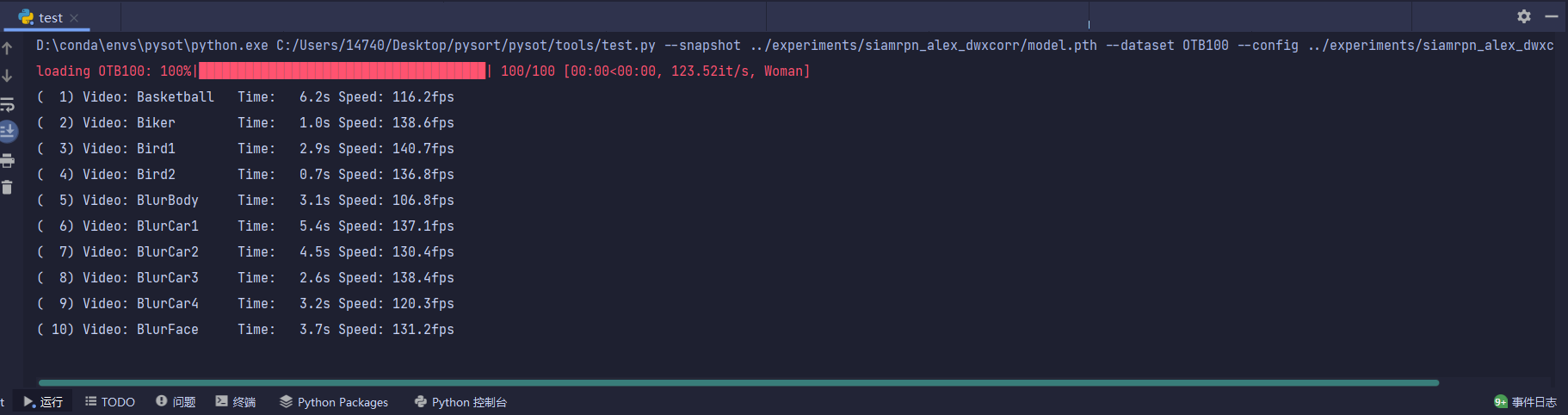 # **运行eval.py** **根据运行test.py的测试OTB100数据集结果model,进行评估(训练结果保存地址:./tools/results下面)** ### **第一步:** #### **配置eval.py**  #### **在参数中,添加代码:** ```python --tr acker_path ../tools/results --dataset OTB100 --num 1 --tracker_prefix model --show_video_level ``` ## **第二步:** **点击OK(确定),运行eval.py** ## **训练结果如下:** 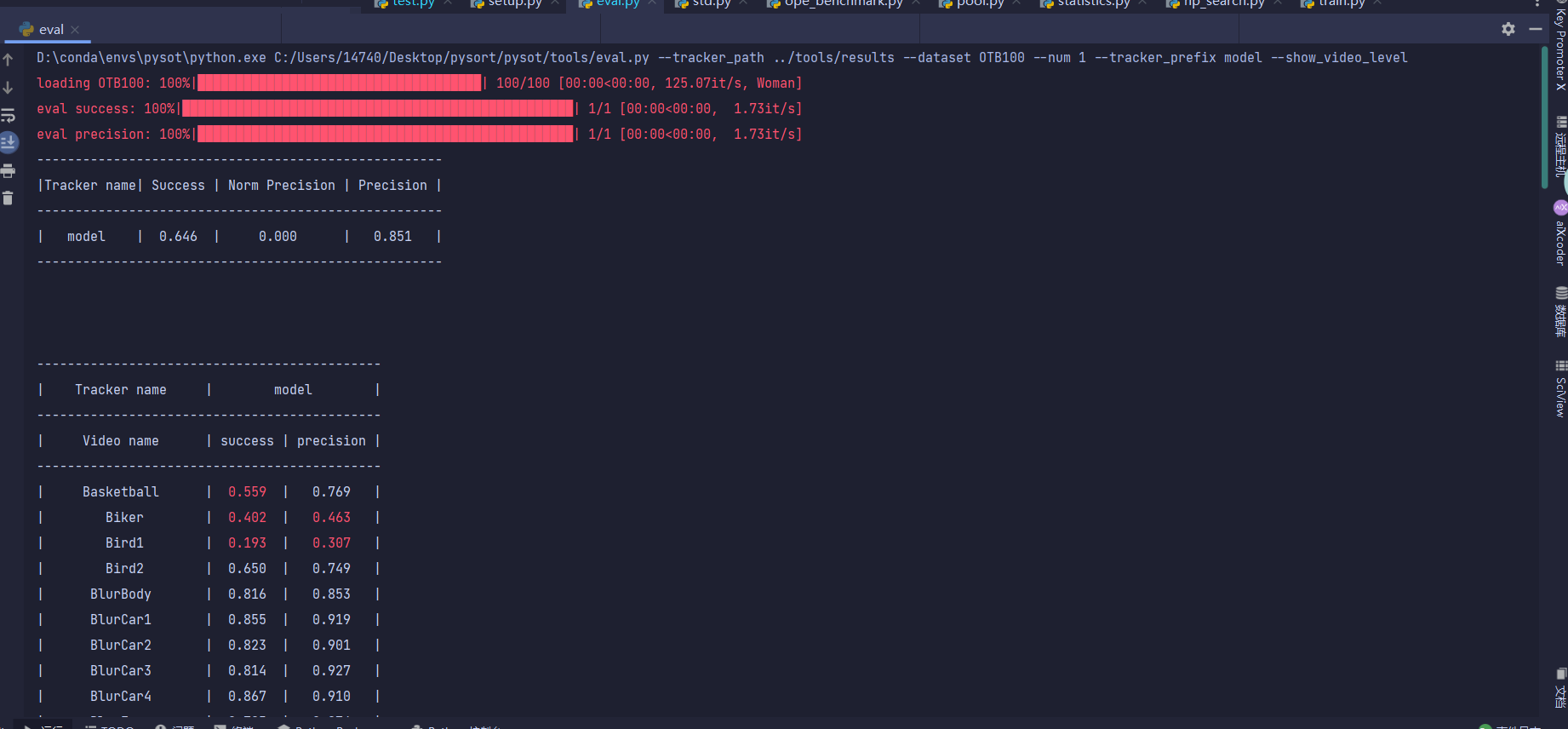 最后修改:2022 年 03 月 22 日 © 允许规范转载 打赏 赞赏作者 支付宝微信 赞 如果文章有用,请随意打赏。

